Anti_Climax
Well-known member
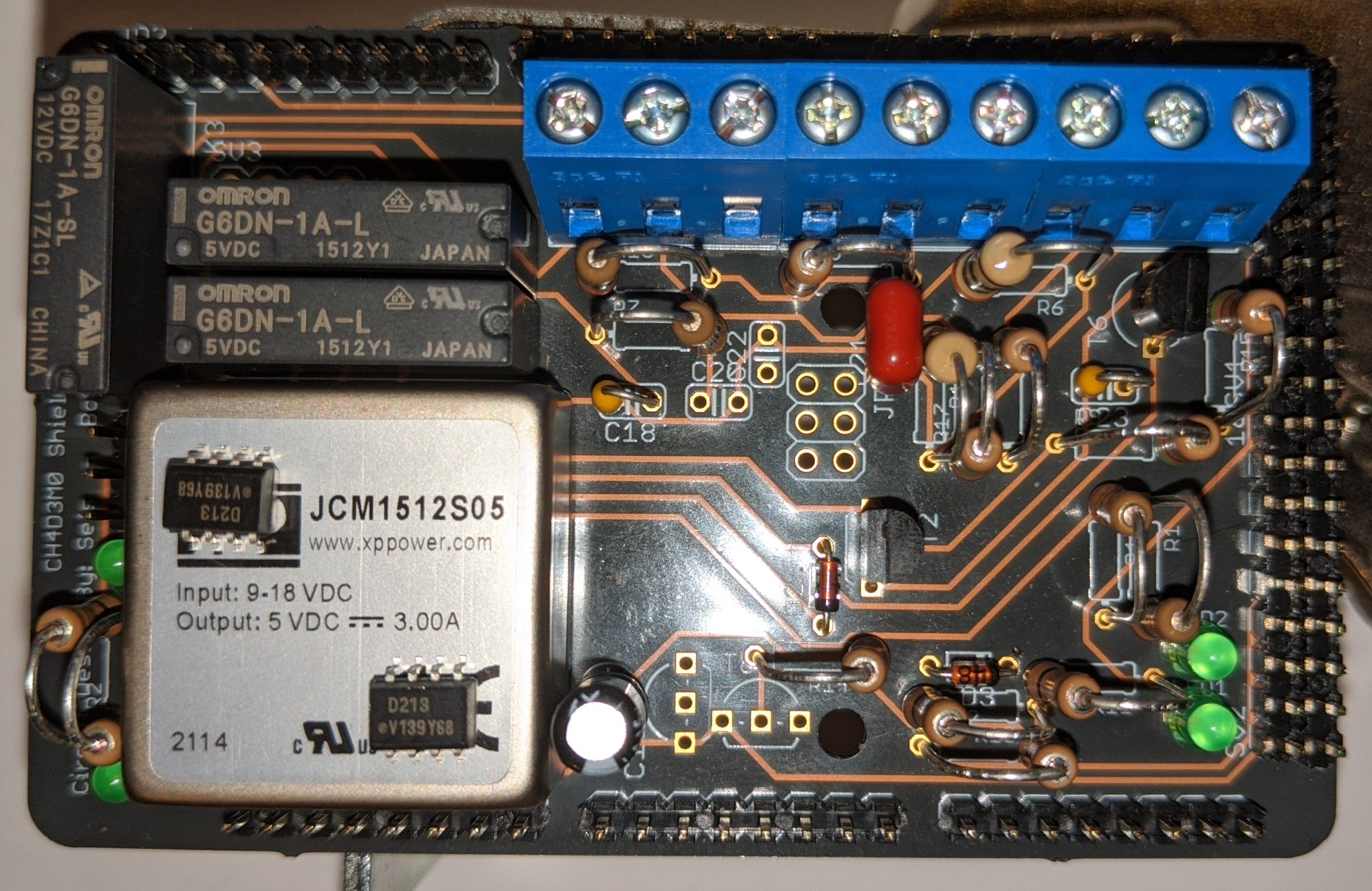
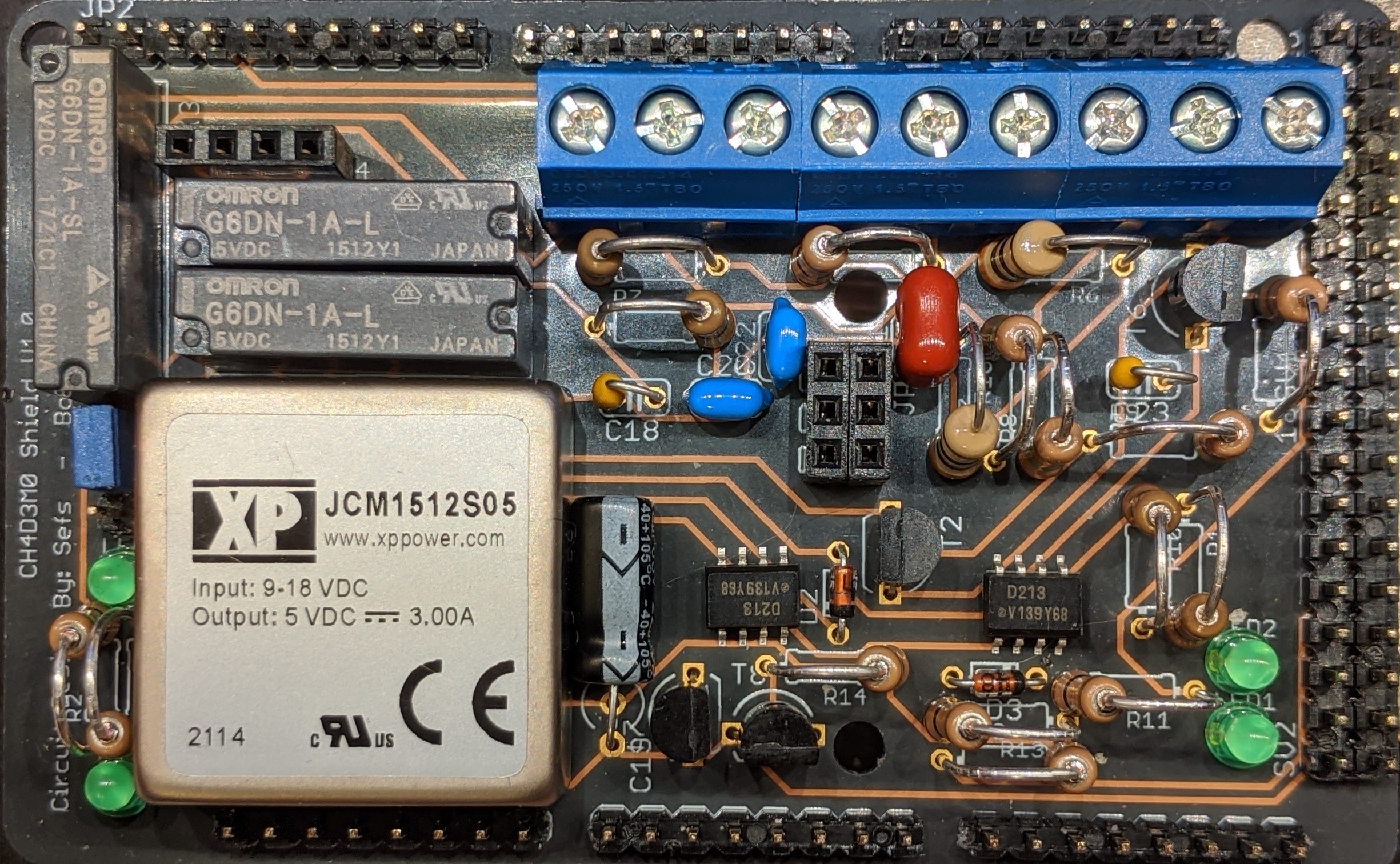
Since taking possession of the CHAdeMO quick charge hardware from Sefs, I've posted most of the code to Github (https://github.com/truss-cpi/FFE-CHAdeMO) along with some other data. In parallel I've designed a "shield" for the EVTV CANDue that should contain every low voltage thing needed to manage a CHAdeMO connection. Combine that CANDue and Shield with the port, contactors and HV wiring, and you have everything you need.
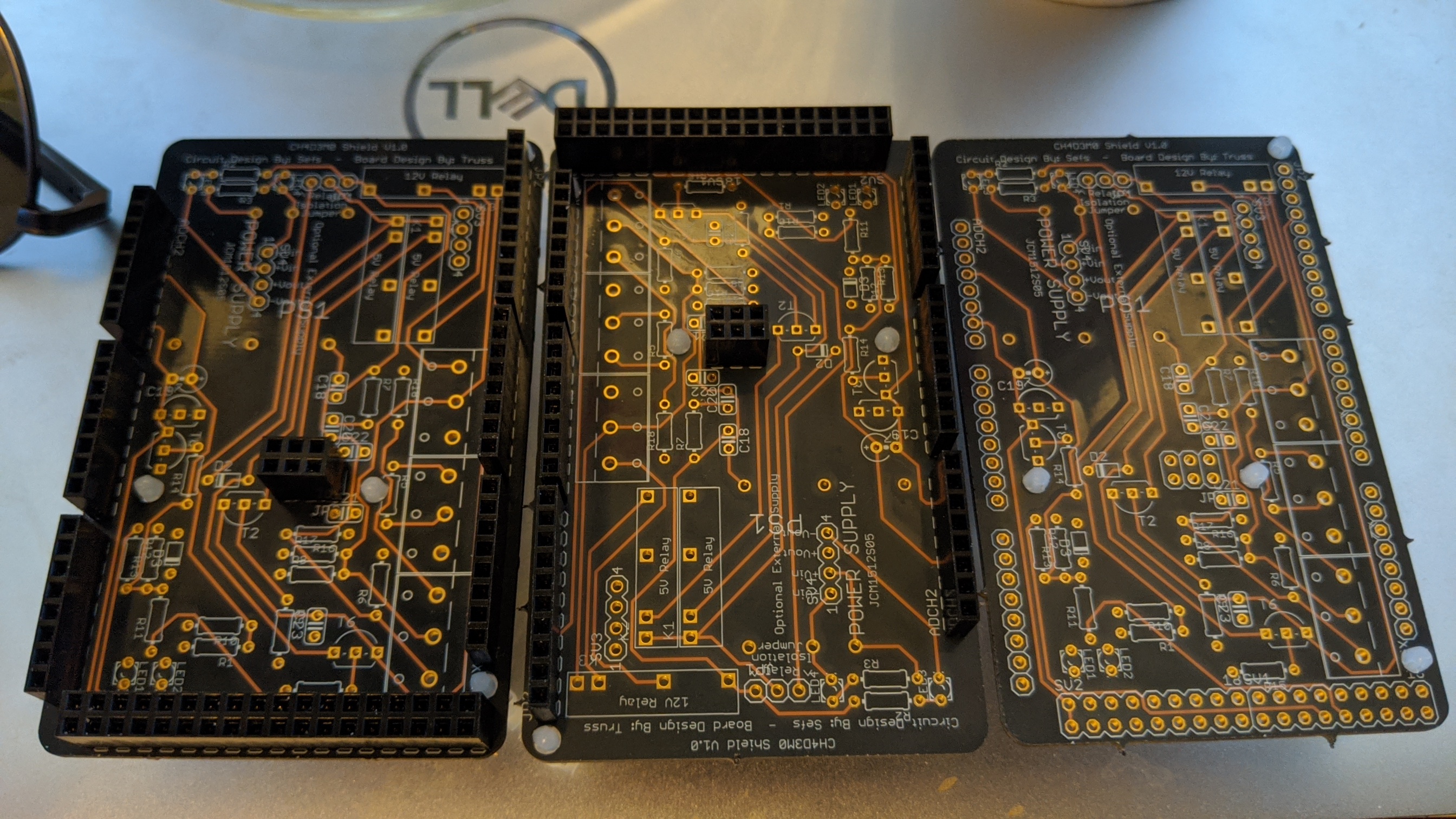
I've sent out for a set of 3 prototype boards which should be arriving in the next few days. I found 3 ADM3052 ICs (the least common component) and I've bought them to use with these three boards. From there I'm looking to build one out completely to test, and if it works I'm happy to sell the others to anyone that's considering installing this mod on their Focus.
If I'm doing my math right the rest of the board components, beyond the ADM3052 chips I've bought, would total about $45. There's some wiggle room particularly with pin header selections but that doesn't change it much. So, if anyone is interested in one of these 2 other boards, let me know and I can sell you one to use for yourself.
Just to keep numbers round, let's say $55 for a board with the ADM3052, you add your $45 in other components (I'll have a list up on the GitHub soon) and a $99 EVTV CANDue and you're got all the low voltage stuff ready to pair with a CHAdeMO port and contactors.
Obviously this is all contingent on validation of the one I build out and the ADM3052s won't be here for a few weeks. Stay tuned.
I've sent out for a set of 3 prototype boards which should be arriving in the next few days. I found 3 ADM3052 ICs (the least common component) and I've bought them to use with these three boards. From there I'm looking to build one out completely to test, and if it works I'm happy to sell the others to anyone that's considering installing this mod on their Focus.
If I'm doing my math right the rest of the board components, beyond the ADM3052 chips I've bought, would total about $45. There's some wiggle room particularly with pin header selections but that doesn't change it much. So, if anyone is interested in one of these 2 other boards, let me know and I can sell you one to use for yourself.
Just to keep numbers round, let's say $55 for a board with the ADM3052, you add your $45 in other components (I'll have a list up on the GitHub soon) and a $99 EVTV CANDue and you're got all the low voltage stuff ready to pair with a CHAdeMO port and contactors.
Obviously this is all contingent on validation of the one I build out and the ADM3052s won't be here for a few weeks. Stay tuned.
")